Sichere CCS-Projekte
Carbon Capture and Storage (CCS) bekommt im Klimaschutzprogramm eine Schlüsselrolle. CCS soll einen relevanten Beitrag leisten, indem bis 2040 27...
Read moreCarbon Capture and Storage (CCS) bekommt im Klimaschutzprogramm eine Schlüsselrolle. CCS soll einen relevanten Beitrag leisten, indem bis 2040 27...
Read moreSchneider Electric präsentiert auf der Interpack 2026 (7.-13. Mai, Halle 5, Stand A24) Innovationen für die nächste Generation der Verpackungstechnik....
Read moreVerpackungen werden zunehmend ganzheitlich bewertet: Neben Kosten rücken auch Recyclingfähigkeit, Klimabilanz und Transparenz in der Lieferkette in den Fokus. Wie...
Read moreIn der industriellen Speiseeisproduktion beginnt die Sicherstellung der Produktqualität bereits bei der fachgerechten Lagerung der Rohmilch. Eine geeignete Füllstandmesstechnik ist...
Read more

Carbon Capture and Storage (CCS) bekommt im Klimaschutzprogramm eine Schlüsselrolle. CCS soll einen relevanten Beitrag leisten, indem bis 2040 27...
Read moreSchneider Electric präsentiert auf der Interpack 2026 (7.-13. Mai, Halle 5, Stand A24) Innovationen für die nächste Generation der Verpackungstechnik....
Read moreVerpackungen werden zunehmend ganzheitlich bewertet: Neben Kosten rücken auch Recyclingfähigkeit, Klimabilanz und Transparenz in der Lieferkette in den Fokus. Wie...
Read moreIn der industriellen Speiseeisproduktion beginnt die Sicherstellung der Produktqualität bereits bei der fachgerechten Lagerung der Rohmilch. Eine geeignete Füllstandmesstechnik ist...
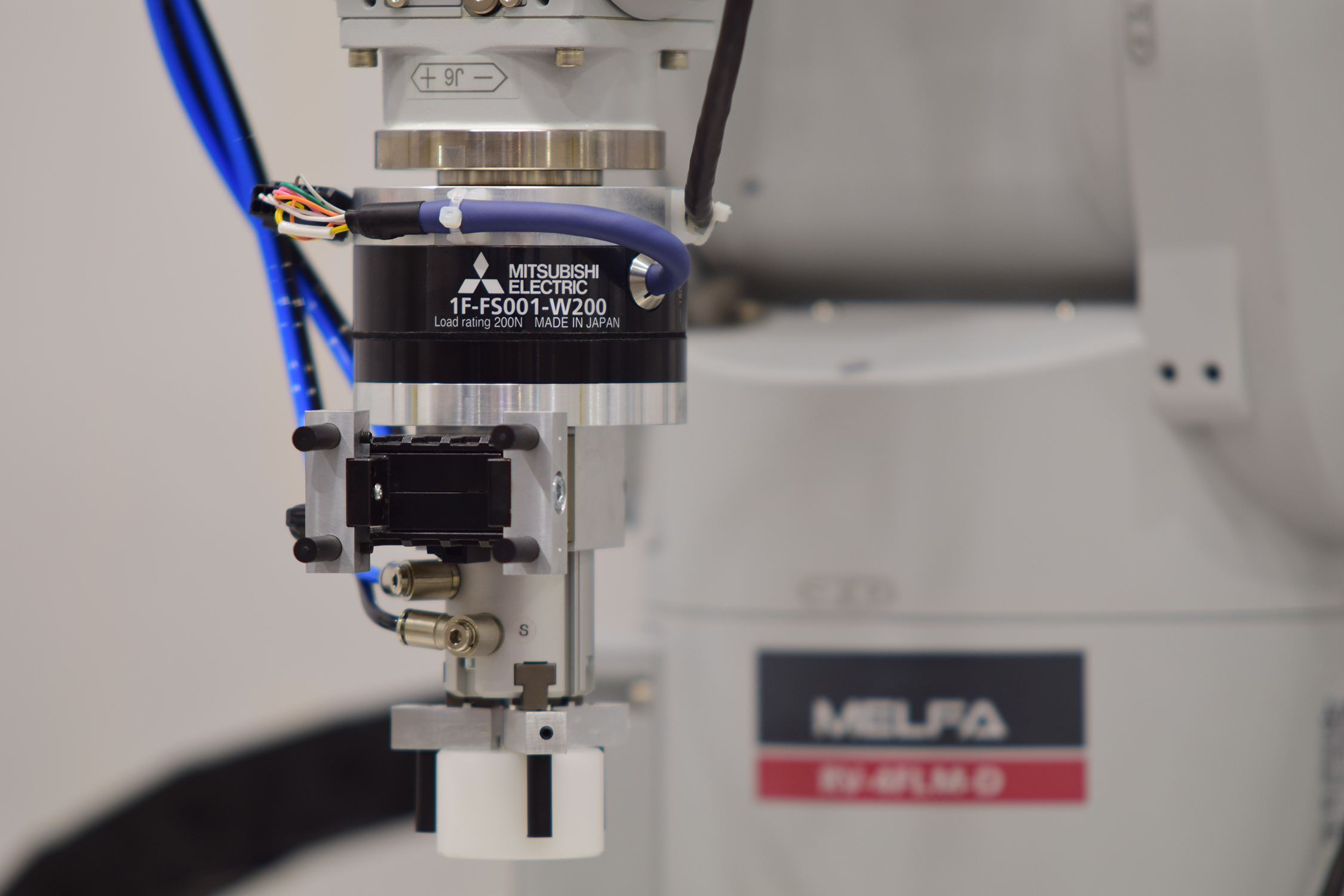
Read moreDie neuen Melfa Knickarm- und Scara-Roboter der Serien RV-FR und RH-FR von Mitsubishi Electric werden jetzt durch einen Kraft-Momenten-Sensor unterstützt, der sich direkt in die Robotersteuerungen CR750/751 und CR800 integrieren lässt. Weil der Force Sensor ohne eigene Steuerung auskommt, werden die Abläufe wesentlich vereinfacht und Engineering-Aufwand eingespart.
Der Force Sensor reguliert anhand voreingestellter Werte die Kraft, mit der ein Roboter mit seiner Umgebung interagiert. Dabei sind die Funktionalitäten des Kraft-Momenten-Sensors in drei Bereiche gegliedert; die Melfa Sense Steuerung umfasst die feedbackbasierte Regelung des Roboters, während mithilfe der Melfa Sense Erkennung Grenz- und Referenzpunkte registriert werden. Das Melfa Sense Logging ermöglicht die Protokollierung, Übermittlung und Verarbeitung der erfassten Kraftsensorinformationen.
In Applikationen wie Fügen und Montieren kann über das Feedback des Force Sensors der Druck nachgeregelt werden, der für die Handhabung des jeweiligen Objekts vorgesehen ist. Da die Positions- und Kraftdaten in Echtzeit gespeichert werden, lassen sich die Regelparameter des Programms zum intelligenten Teaching des Roboters heranziehen.
Durch den Echtzeitregelkreis wird höchste Präzision in der konstanten Kraftausübung erreicht, sodass beispielsweise filigrane Entgrat- und Polierarbeiten an empfindlichen Kunststoffteilen mit dem Roboter automatisiert werden können.
Mithilfe des Force Sensors kann der Roboter anhand der Nachgiebigkeit oder des Dämpfungskoeffizienten auf die Oberflächenbeschaffenheit zu bearbeitender Objekte reagieren beziehungsweise diese hieran erkennen. Er eignet sich damit in bestimmten Applikationen als Alternative zum Visionsystem.
Die Protokollierung von Kraftsensorinformationen ermöglicht den Aufbau wertvoller Datenbestände, die über die Programmiersoftware RT Tool Box zur weiteren Analyse an einen FTP-Server geschickt werden können. Bei haptischen Prüfungen, beispielsweise zum korrekten Ansprechverhalten von Drucktastern und Drehreglern in der Automobilindustrie, dienen diese Daten der Qualitätssicherung. Die Rückverfolgbarkeit der Roboterprüfung über mehrere Jahre beschleunigt zudem das Troubleshooting an den Produktionslinien.
Der innovative Force Sensor ist jetzt für die gesamte Roboterpalette von Mitsubishi Electric und deren Steuerungen erhältlich, einschließlich der neuesten Generation.
Mitsubishi auf der SPS 2019: Halle 7, Stand 391
![]()
![]()
![]()

Die Medienmarke PROZESSTECHNIK ist die unverzichtbare Informationsquelle für Experten und Entscheider in der chemischen, pharmazeutischen und lebensmitteltechnischen Industrie. Wir setzen Zeichen, auch in Sachen digitaler Transformation.